Computer Vision
Ever since the release of Kinect, I have been fascinated by the possibilities of computer vision. I always seize the opportunity to create with it, as long as it does not invade anyone's privacy.
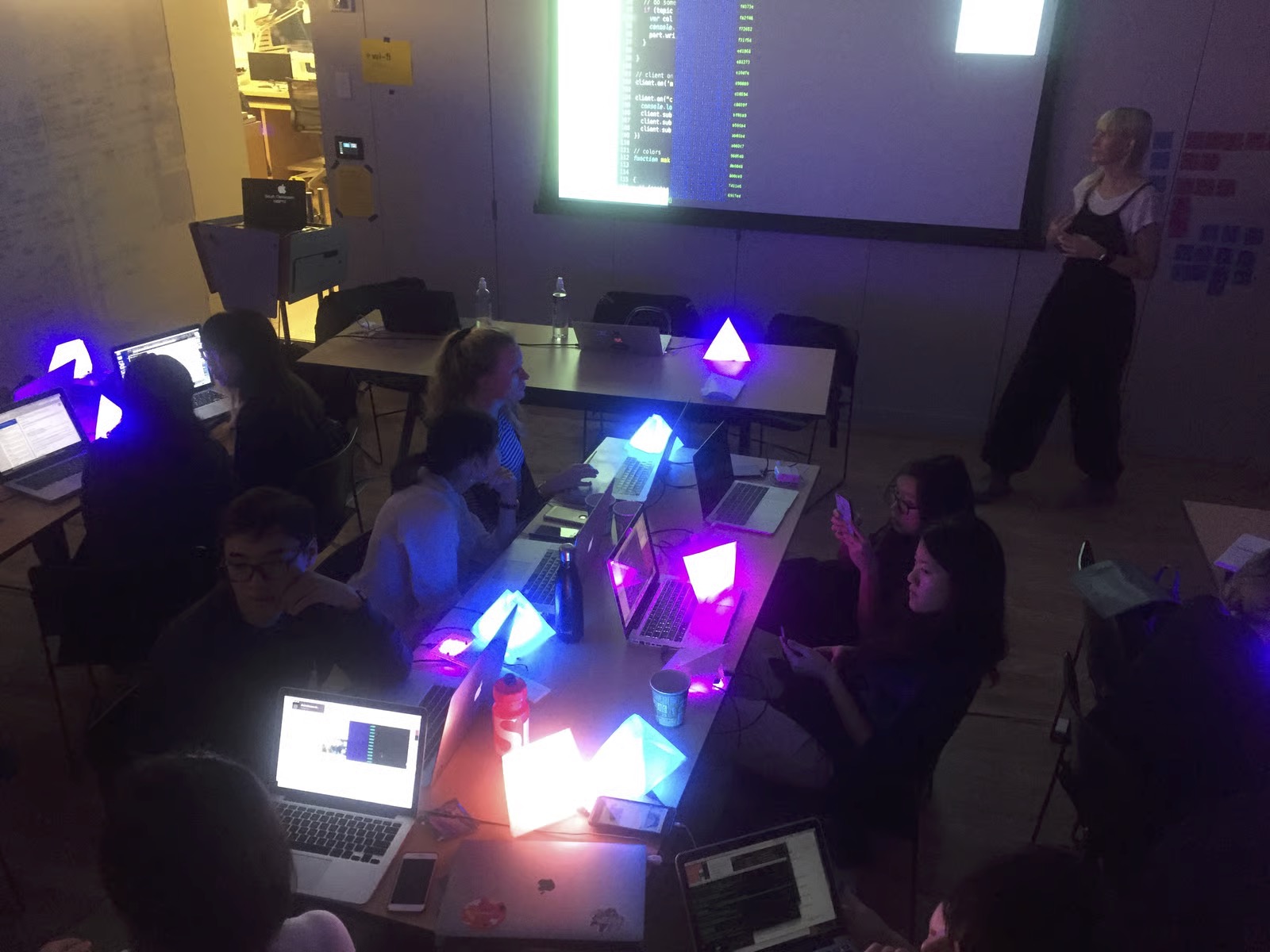
I have had the privilege of working on many projects, which I like to call "happy surveillance." Although I am able to see people, I never use this information in a harmful way. My goal is always to create delightful experiences, whether it be playing with computer-generated snow, dancing with robots, or walking through water.
These days that same fascination points at medicine. At eovision I'm the founding engineer building computer vision for pathology. I built a gigapixel slide viewer from scratch, and a one-shot learning pipeline that lets a pathologist circle a single cell and find every similar one across an enormous slide. Same instinct as the older work: look closely, and only ever in service of the person on the other end.
Image descriptions generated by Claude Opus 4.6
These image descriptions were written by Claude. I provided my own code, project proposals, and notes as input so the descriptions could explain what you're actually seeing.